- ASIC
- 电池管理 IC
- 时钟和时序解决方案
- ESD 和浪涌保护器件
- 汽车以太网
- 评估板
- 高可靠性
- 隔离
- 存储器
- 微控制器
- 功率产品
- 射频
- 安全智能卡解决方案
- 传感器技术
- 小信号晶体管和二极管
- 收发器
- 通用串行总线(USB)
- 无线连接
- 英飞凌大中华区生态圈
- 搜索工具
- 技术
- 封装
- 订单
- 概览
- 嵌入式闪存eFlash IP 解决方案
- RAM和Flash多芯片封装MCP解决方案
- F-RAM铁电存储器
- NOR 闪存
- nvsRAM非易失性存储器
- PSRAM — 伪静态RAM
- 抗辐射和高可靠性的存储器
- SRAM静态随机存储器
- 晶圆和裸片存储器解决方案
- 概览
- Calypso® 产品
- CIPURSE™ 产品
- 非接触式存储
- 了解 OPTIGA™ 嵌入式加密解决方案
- SECORA™ 安全解决方案
- 安全控制器
- 智能卡模块
- 政府身份证的智能解决方案
- 概览
- REAL3™ 3D ToF 图像传感器
- 电流传感器
- 气体传感器
- Inductive position sensors
- 微机电系统麦克风
- 压力传感器
- 雷达传感器
- 磁性位置传感器
- 磁性速度传感器
- Capacitive sensors
- Temperature sensors
- Battery sensors
- Digital X-ray
- Computed tomography
- Sensor interface ASICs
- 概览
- USB 2.0 外设控制器
- USB 3.2 外设控制器
- USB 集线器控制器
- USB PD 高压微控制器
- USB-C AC-DC 和 DC-DC 充电解决方案
- USB-C 充电端口控制器
- USB-C 供电控制器
- 概览
- AIROC™ 车载无线
- AIROC™ 蓝牙Bluetooth® 和多协议解决方案
- AIROC™ 互联微控制器
- AIROC™ Wi-Fi + Bluetooth® 组合
- AIROC™ Ultra-Wide Band Solutions
- 概览
-
TriCore™ AURIX™ TC2x安全模块
- 概览
- AURIX™系列 – TC21xL
- AURIX™ 系列 – TC21xSC (无线充电)
- AURIX™ 系列 – TC22xL
- AURIX™系列 – TC23xL
- AURIX™ 系列 – TC23xLA (ADAS)
- AURIX™ 系列 – TC23xLX
- AURIX™ 系列 – TC264DA (ADAS)
- AURIX™系列 – TC26xD
- AURIX™ 系列 – TC27xT
- AURIX™ 系列 – TC297TA (ADAS)
- AURIX™ 系列 – TC29xT
- AURIX™ 系列 – TC29xTT (ADAS)
- AURIX™系列 – TC29xTX
- AURIX™ TC2x仿真器件
- 32 位TriCore™ AURIX™ – TC3x
- 32 位TriCore™ AURIX™ - TC4x
- 概览
- PSOC™ 4 Arm® Cortex® -M0/M0+
- PSOC™ 4 HV Arm® Cortex® -M0+
- PSOC™ 5 LP Arm® Cortex® -M3
- PSOC™ 6 Arm® Cortex-M4®/M0+
- PSOC™ 多点触控触摸屏控制器
- PSOC™ Control C3 Arm® Cortex®-M33
- PSOC™ Automotive 4: Arm® Cortex®-M0/M0+
- PSOC™ Edge Arm® Cortex® M55/M33
- PSOC™ Control C1 Arm® Cortex®-M0
- 概览
- 32 位 TRAVEO™ T2G Arm® Cortex®用于车身电子应用
- 用于仪表盘的 32 位 TRAVEO™ T2G Arm® Cortex®
- 概览
- 桥式整流器和交流开关
- CoolSiC™ 肖特基二极管
- 二极管裸片
- 硅二极管
- 晶闸管/二极管模块
- 晶闸管软启动器模块
- 晶闸管/二极管盘
- 概览
- 汽车栅极驱动器
- 用于 GaN HEMT 的栅极驱动器 IC
- Gate Driver ICs for SiC MOSFETs
- Half-Bridge Gate Driver ICs
- High-Side Gate Driver ICs
- 电气隔离栅极驱动器
- 电平转换
- Low-Side Gate Driver ICs
- Three-Phase Gate Driver ICs
- 变压器驱动IC
- 概览
- BLDC 电机驱动器
- BDC电机驱动器
- 步进电机和伺服电机驱动器
- 带MCU的电机驱动器
- 使用 MOSFET 的桥式驱动器
- GaN EiceDRIVER™高速栅极驱动器
- 概览
- 汽车级MOSFET
- 双 MOSFET
- MOSFET(Si 和 SiC)模块
- N 沟道耗尽型 MOSFET
- N 沟道 MOSFET
- P 沟道 MOSFET
- 碳化硅 CoolSiC™ MOSFET
- 250V至600V G14小信号MOS
- 概览
- OPTIGA™ Authenticate
- OPTIGA™ Authenticate NFC 解决方案
- OPTIGA™ Connect – 交钥匙式 eSIM 安全解决方案
- OPTIGA™ Trust
- OPTIGA™ 可信平台模块 (TPM)
- 概览
- EZ-PD™ ACG1F 单端口 USB-C 控制器
- EZ-PD™ CCG2 USB Type-C 端口控制器
- EZ-PD™ CCG3PA Automotive USB-C 和 Power Delivery 控制器
- EZ-PD™ CCG4 双端口 USB-C 和 PD
- EZ-PD™ CCG5 双端口和 CCG5C 单端口 USB-C PD 控制器
- EZ-PD™ CCG6 单端口 USB-C & PD 控制器
- EZ-PD ™ CCG6_CFP 和 EZ-PD ™ CCG8_CFP 双单端口 USB-C PD
- EZ-PD™ CCG6DF 双端口和 CCG6SF 单端口 USB-C PD 控制器
- EZ-PD™ CCG7D 汽车双口 USB-C PD + DC-DC 控制器
- EZ-PD™ CCG7S 汽车单口 USB-C PD 解决方案,配备DC-DC控制器
- EZ-PD™ CCG8 双/单口 USB-C PD
- EZ-PD™ CMG1 USB-C EMCA 控制器
- 支持 EPR 的 EZ-PD™ CMG2 USB-C EMCA 控制器
- 最新动态
- 航空航天
- 人工智能和数据中心
- 智能汽车解决方案
- 通讯
- 消费类电子产品
- 健康和 生活方式
- 工业
- 安全解决方案
- 智能家居和楼宇
- 解决方案
- 概览
- 电源适配器和充电器
- 适用于智能电视的完整系统解决方案
- 移动设备和智能手机解决方案
- 家庭娱乐应用的半导体解决方案
- 智能会议系统
- 无人机
- AR and smart glasses
- 光伏
- 消费类可穿戴设备
- 家用电器
- 概览
- 电源适配器和充电器
- 资产跟踪
- 电池化成和测试
- 电动叉车
- Battery energy storage (BESS)
- 电动汽车充电
- 高压固态配电系统
- 工业自动化
- 工业电机驱动和控制
- 工业机器人
- LED 照明系统设计
- 轻型电动车解决方案
- 电力传输和配电
- 轨交
- 不间断电源 (UPS)
- Digital health
- 机器人
- Wind power
- 氢电解
- 光伏
- 工业& 医疗 SMPS
- 电动工具
- 概览
- BMS汽车电池管理系统
- 电动汽车充电
- 燃料电池电动汽车 (FCEV) 传动系统
- 电动汽车辅助逆变器
- 适用于建筑、商用和农用车辆的高压辅助应用
- 电动汽车牵引逆变器
- 牵引逆变器(商用车)
- 牵引逆变器(两轮车和三轮车)
- 用于电动汽车的高压 DC-DC 转换器
- 高压DC-DC转换器(商用车)
- 车载充电(电动商用车)
- 车载充电器(OBC)
- 电动两轮车和三轮车的车载充电 (OBC) 解决方案
- 最新动态
- 概览
- AIROC™ 软件&工具
- AURIX™应用软件
- DRIVECORE™ 用于汽车软件开发
- iMOTION™ 工具和软件
- Infineon智能功率开关和栅极驱动器工具套件
- MOTIX 软件&工具
- OPTIGA™工具和软件
- PSOC™ 软件&工具
- TRAVEO™ 软件&工具
- XENSIV™ 工具和软件
- XMC™ 工具和软件
- 概览
- EZ-PD™ CCGx Dock 软件开发工具包
- FMx Softune IDE
- ModusToolbox™ 软件
- PSOC™ Creator软件
- 雷达开发套件
- 锈
- USB 集线器控制器
- 无线连接蓝牙网状网络辅助应用程序
- XMC™ DAVE™ 软件
- 最新动态
- 支持
- 培训
- 英飞凌开发者社区
- 最新消息
商业财经新闻
07/07/2026
商业财经新闻
04/07/2026
商业财经新闻
03/07/2026
商业财经新闻
02/07/2026
- 公司名称
- 我们的故事
- 活动资讯
- 新闻中心
- 投资者
- 职业生涯
- 质量
- 最新消息
商业财经新闻
07/07/2026
商业财经新闻
04/07/2026
商业财经新闻
03/07/2026
商业财经新闻
02/07/2026
- 您即将进入英飞凌境外官方网站 Infineon.com。您的相关个人信息可能在境外被收集和处理, 用于交易、支付、履约及售后事宜
- 本境内网站 Infineon.cn 仅提供产品信息展示服务,不开展线上交易、订单处理、支付结算及电子商务平台运营活动
- 所有交易、支付、履约及售后事宜均由境外主体独立完成并承担全部法律责任
- 本网站与境外网站为独立运营主体,交易行为仅发生于您与境外运营主体之间


微信分享
用微信扫描二维码并分享
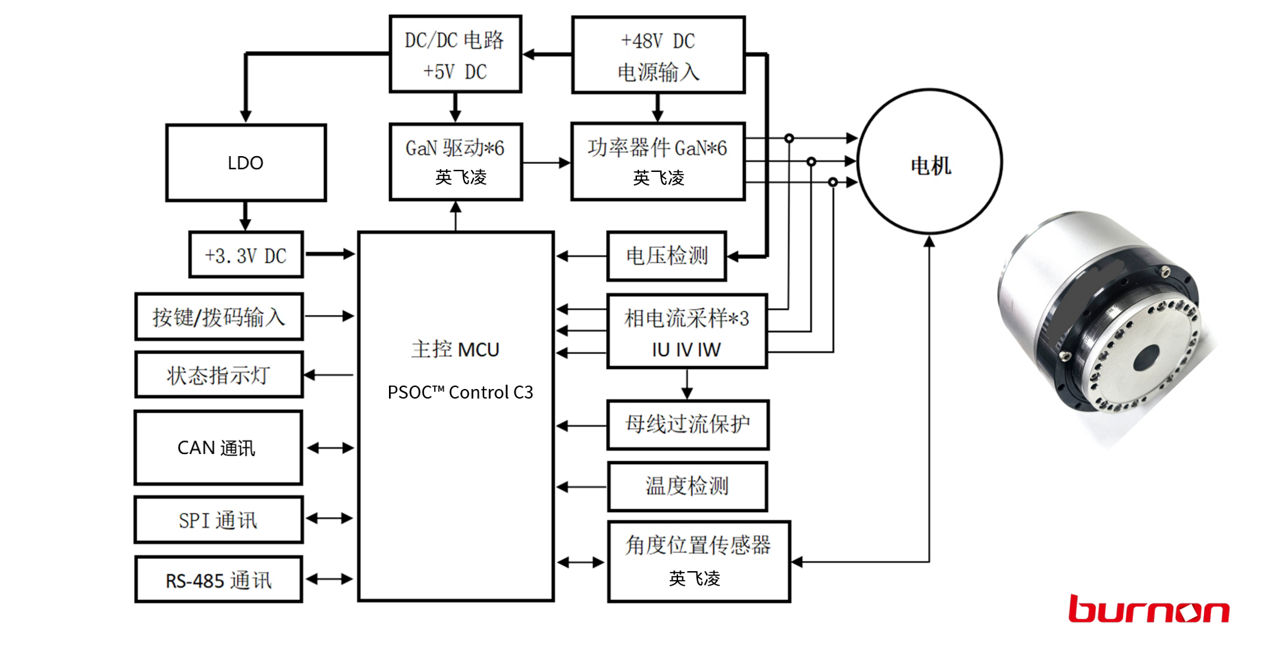
PSOC™ Control C3 MCU 微控制器在电机驱动方案中如何应用?请观看视频获取详情。
英飞凌GaN氮化镓有什么优势?双向开关颠覆功率电子技术格局!
英飞凌氮化镓GaN产品能否应用哪些领域?有什么优势?请观看视频快速获取答案。
常见问题集锦FAQ
常见问题集锦FAQ
快速找到答案,高效解决问题。
Q: 请问不同的FOC电机,它的参数是有需要微调的。有没有什么工具去辅助微调?
首先我们看电机是无感还是有感的,就是位置反馈这个环节,因为FOC驱动电机需要知道转子的准确位置。如果是伺服的话,它是有位置反馈的,说它对电机的参数其实并不敏感,因为它的位置已经由传感器反馈回来了。FOC 控制里面,知道流过电机的实际电流,对于没有位置传感器的,是可以通过电流和电机的参数去估算出转子的位置在哪里。所以说如果是无感估算的话,对电机的参数就有一定的敏感性,电机的参数包括了电感量、电阻,等等。但如果是有位置传感器的,其实对电机参数这一点并不敏感,就拿我们做的这几个方案来说。只要有位置反馈,就可以把位置值读回来直接用,并以此计算出电机的转速,做速度与位置的闭环控制。
在我们的代码里面已经把这些电机的参数做成一个客户可以自行调整的表格,放在一个Config.H的头文件里面。可以根据实际参数来调整,如电机的极对数、相电感、相电阻,额定电流、编码器分辨率等,填进去即可。我们这个代码编译完成后,就可以烧录进MCU驱动电机跑起来,如果有需要做针对性调整改进的话,只要根据带载的情况去对各个控制环路参数上做一些调整即可。
Q: PSOC™ Control C3是一个单核的一个 MCU ,只负责现这个电机的一个驱动,请问调试的过程中,容不容易出现因为涨停或者频率不对导致容易烧坏?
不会,因为我们的所有设置最底层的这个硬件保护是存在的,在调试的时候,电机先停下来,再去进入 debug 状态,不要在电机转的时候把它退出或者是进入到 debug 状态,就不会出现这种问题。
Q: 请问PSOC™ Control C3 MCU的资源还够不够我去跑个 RTOS?
RTOS的话,像我们现在这种,我们已经把它跑到了一个基本上100K 已经算比较高的一个频率了,在你们实际应用里面,我估计可能你不需要跑那么高,可能跑个七八十K 或者是五六十K 基本上都可以。我们在10个微秒里面,才占用了40%,所有的这个控制环路才用了4.1个微秒。基本上如果把频率再降低一点,它所占用的资源会更少。加上因为ATOS本身占用的资源其实并不是很多,所以应该是没有问题的。
Q: PSOC™ Control C3 MCU 到 GaN之间有没有必要去做隔离电路?
像这种低压的这种就没有必要。如果是做高压的话,要具体看场合,是不是允许我的操作界面是带电的,不能带热电的,如果是的话那可能就要考虑加隔离了。
Q: 请问方案的过流保护和过压保护,有没有评估过响应时间?
这个方案里我们是用了英飞凌内部MCU的一个比较器的触发。只要这个值超过了我们设定的阈值,它就会直接触发把6路的 p 桥边关掉,我们叫失效角。我们实测过,这个响应时间是很短的,英飞凌的是纳秒级的。这个信号的至少应该不会超过100个纳秒。
关于过压我们是读了母线电压的采样,因为这个方案是小功率的,在我们另外一个1.5千瓦方案上面使用了一路的 PWM 输出,通过一个 MOS ,再带一个刹车电阻来实现。先把母线电压调进来,比如这个系统我不允许它超过55伏,当母线电压超过55伏时刹车电路就会介入做PI的调节。
Q: PSOC™ Control C3 MCU在模拟方面针对电机应用有哪些优势?
- 12位12Msps SAR ADC,带16个独立采样保持器,最大支持16路模拟通道并行空闲采样。 完美支持多电机,多电阻采样需求。
- 所有采样通道可独立配置增益(1, 3, 6, 12)。
- 支持伪差分采样模式,可以省掉外部运放,降低方案成本。
- 集成5个带谐波发生器功能的比较器,每个比较器带10bit 30Msps DAC为比较器提供基准电压。
- 16路模拟通道最多可配置为8个独立组,每组支持多达8路触发源。
- 所有采样通道都支持限幅检测功能(助力过流/过压保护,减少CPU干预)。
- 集成一个自主控制器,无需 CPU 介入即可执行预设的程序化操作。
Q: 如果要做一个多电机项目的话,应该XMC7000还是PSOC™ Control C3 MCU?
根据我们实际的案子的一个需求。比如说所谓的多电机,我们要做几个电机呢?PSOC™ Control C3 MCU我们目前自己做的方案,能做到维也纳 PFC 加三电机,相当于在商空上面可以用,就是一个8千瓦的维也纳 PFC加一个FOC控制的压机,再加FOC控制的双风机。所以我们目前做的方案最多就支持三个 FOC 的电机了。但如果要做更多,XMC7000 资源更丰富,算力足够,ADC和PWM通道也足够多,比如说要超过五个甚至更多的话,其实可以考虑我们XMC7000。但我们其实XMC7000更多的是做那种,比如说各种多通道步进,多电机,以及伺服的那种应用。XMC7000 的每个 TCPWM 接口都可以支持编码器接口,很适合多电机多编码器的支持。所以只要大家有马达的需求,可以找到贝能,找到英飞凌,我们其实是可以针对大家的需求去评估,我们提供怎么样的芯片或怎么样的方案给到合作伙伴。
Q: 如果从引角共用的角度的话,XMC7000 MCU和PSOC™ Control C3 MCU是哪一个更好?
XMC7000 MCU贵,PSOC™ Control C3 MCU便宜。所以如果PSOC™ Control C3能满足要求,首选 PSOC™ Control C3.
没有找到你的问题答案?点击这里寻求技术专家支持
如果您对本方案感兴趣,请填写您的需求,我们的技术专家将尽快与您联系,并根据您的项目需求提供选型建议和样品。
本页面所展示的文档及其描述的解决方案(下称“本解决方案”)由本解决方案的所有者提供并设计,其名称与联系信息如下所示:Burnon International Limited (贝能国际有限公司)。
英飞凌不对本解决方案作出任何形式的明示或暗示的保证,包括但不限于不侵权、适销性或适用于特定用途的默示保证。
本解决方案可能包含设计缺陷或错误,可能导致最终产品偏离预期规格。英飞凌不承担因应用或使用本解决方案而引起的任何责任。本文档中提供的任何信息,包括本解决方案的相关信息,均仅供参考。本解决方案的所有者有责任对本解决方案及基于本解决方案衍生的任何相关应用的功能和安全性进行妥善设计、编程和测试。如有任何相关问题,请直接咨询本解决方案的所有者。
本解决方案不得用于任何可能因本解决方案的失效或其使用后果而合理预见将导致人身伤害的应用。
本文件及本解决方案可能随时被删除、更改或更新,恕不另行通知。为获取更多说明,请同时阅读本网站的使用条款。