- ASIC
- 电池管理 IC
- 时钟和时序解决方案
- ESD 和浪涌保护器件
- 评估板
- 高可靠性
- 隔离
- 存储器
- 微控制器
- 功率产品
- 射频
- 安全智能卡解决方案
- 传感器技术
- 小信号晶体管和二极管
- 收发器
- 通用串行总线(USB)
- 无线连接
- 英飞凌大中华区生态圈
- 搜索工具
- 技术
- 封装
- 购买渠道
- 概览
- 嵌入式闪存 IP 解决方案
- Flash+RAM MCP 解决方案
- F-RAM(铁电RAM)
- NOR 闪存
- nvsRAM(非易失性 SRAM)
- PSRAM — 伪静态RAM
- 经过抗辐射强化和高可靠性的存储器
- RRAM 电阻式存储器
- SRAM(静态RAM)
- 晶圆和裸片存储器解决方案
- 概览
- AC-DC电源转换
- 电动汽车动力系统
- D 类音频放大器 IC
- 非接触式电源和检测 IC
- DC-DC 转换器
- 二极管&晶闸管 (Si/SiC)
- 氮化镓(GaN)
- 栅极驱动器 IC
- IGBT 产品及驱动器件
- 智能功率模块(IPM)
- LED 驱动器集成电路
- 电机控制 IC 和驱动
- 功率MOSFET 和 MOS管
- 电源IC
- Infineon 智能功率开关
- 固态继电器
- 无线充电 IC
- 概览
- Calypso® 产品
- CIPURSE™ 产品
- 非接触式存储
- 了解 OPTIGA™ 嵌入式加密解决方案
- SECORA™ 安全解决方案
- 安全控制器
- 智能卡模块
- 政府身份证的智能解决方案
- 概览
- 3D ToF传感器
- MOTIX™ MCU (SoC) 基于 Arm® Cortex®-M0,集成半桥驱动器
- 气体传感器
- 电感式位置传感
- 磁传感器
- 微机电系统麦克风
- 压力传感器
- 雷达传感器
- 概览
- USB 2.0 外设控制器
- USB 3.2 外设控制器
- USB 集线器控制器
- USB PD 高压微控制器
- USB-C AC-DC 和 DC-DC 充电解决方案
- USB-C 充电端口控制器
- USB-C 供电控制器
- 概览
- AIROC™ 车载无线
- AIROC™ 蓝牙Bluetooth® 和多协议解决方案
- AIROC™ 互联微控制器
- AIROC™ Wi-Fi + Bluetooth® 组合
- 概览
- MOTIX™电机控制IC用于BLDC电机
-
MOTIX™ 电机控制IC,用于有刷直流电机
- 概览
- TRAVEO™ T2G CYT2B9系列
- FM3 CY9AFx1xL/M/N 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx2xK/L 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx3xK/L 系列超低漏电流 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx4xL/M/N 系列低功耗 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx5xM/N/R 系列低功耗 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFxAxL/M/N 系列超低漏电流 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx1xN/R 高性能系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx1xS/T 高性能系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx2xJ 系列 Arm® Cortex-M3®微控制器 (MCU)
- FM3 CY9BFx2xK/L/M 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx2xS/T 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM4 32 位 Arm® Cortex-M4® 微控制器 (MCU) 系列
- 概览
-
TriCore™ AURIX™ TC2xx安全模块
- 概览
- AURIX™系列 – TC21xL
- AURIX™ 系列 – TC21xSC (无线充电)
- AURIX™ 系列 – TC22xL
- AURIX™系列 – TC23xL
- AURIX™ 系列 – TC23xLA (ADAS)
- AURIX 系列 – TC23xLX™
- AURIX™ 系列 – TC264DA (ADAS)
- AURIX™系列 – TC26xD
- AURIX™ Family – TC27xT
- AURIX™ 系列 – TC297TA (ADAS)
- AURIX™ 系列 – TC29xT
- AURIX™ 系列 – TC29xTT (ADAS)
- AURIX™系列 – TC29xTX
- AURIX™ TC2xxED (仿真设备)
-
32 位TriCore™ AURIX™ – TC3xx
- 概览
- AURIX™系列 TC32xLP
- AURIX™ 系列 – TC33xDA
- AURIX™系列 - TC33xLP
- AURIX™ 系列 – TC35xTA(ADAS)
- AURIX™ 系列 – TC36xDP
- AURIX™系列 – TC37xTP
- AURIX™ 系列 – TC37xTX
- AURIX™ 系列——TC38xQP
- AURIX™ 系列——TC39xTM
- AURIX™ 系列 – TC39xXA(ADAS)
- AURIX™ 系列 – TC39xXM(ADAS)
- AURIX™ TC39xXX汽车MCU
- AURIX™ 系列 – TC3Ex
- AURIX™ TC37xTE (エミュレーションデバイス)
- AURIX™ TC39xXE(仿真设备)
- 32 位TriCore™ AURIX™ - TC4x
- 概览
- 32 位 PSOC™ 4 Arm® Cortex®-M0/M0+
- 32 位 PSOC™ 4 HV Arm® Cortex-M0®+
- 32 位 PSOC™ 5 LP Arm® Cortex®-M3
- 32 位 PSOC™ 6 Arm® Cortex-M4®/M0+
- 32 位 PSOC™ 汽车多点触控 Arm® Cortex-M0®
- 32 位 PSOC ™控制臂® Cortex ® -M33 MCU
- 32 位 PSOC™ 指纹 Arm® Cortex-M0®+
- 汽车 PSOC™ 4:32 位 Arm® Cortex-M0®/M0+ 微控制器
- PSOC ™ Edge Arm ® Cortex ®多核
- 概览
- 32 位 TRAVEO™ T2G Arm® Cortex®用于车身电子应用
- 用于仪表盘的 32 位 TRAVEO™ T2G Arm® Cortex®
- 概览
- 桥式整流器和交流开关
- CoolSiC™ 肖特基二极管
- 二极管裸片
- 硅二极管
- 晶闸管/二极管模块
- 晶闸管软启动器模块
- 晶闸管/二极管盘
- 概览
- 32-bit PSOC™ Control Arm® Cortex®-M33 MCU
- iMOTION™集成电机控制解决方案
- Embedded Power ICs (System-on-Chip) -146
- MOTIX™电机控制IC用于BLDC电机
- MOTIX™ 电机控制IC,用于有刷直流电机
- MOTIX™ 多半桥IC用于伺服和步进电机
- 概览
- 汽车级MOSFET
- 双 MOSFET
- MOSFET(Si 和 SiC)模块
- N 沟道耗尽型 MOSFET
- N 沟道功率 MOSFET
- P 沟道功率 MOSFET
- 碳化硅 CoolSiC™ MOSFET
- 小信号/小功率 MOSFET
- 概览
- OPTIGA™ Authenticate
- OPTIGA™ Authenticate NFC 解决方案
- OPTIGA™ Connect – 交钥匙式 eSIM 安全解决方案
- OPTIGA™ Trust
- OPTIGA™ 可信平台模块 (TPM)
- 概览
- EZ-PD™ ACG1F 单端口 USB-C 控制器
- EZ-PD™ CCG2 USB Type-C 端口控制器
- EZ-PD™ CCG3PA Automotive USB-C 和 Power Delivery 控制器
- EZ-PD™ CCG4 双端口 USB-C 和 PD
- EZ-PD™ CCG5 双端口和 CCG5C 单端口 USB-C PD 控制器
- EZ-PD™ CCG6 单端口 USB-C & PD 控制器
- EZ-PD ™ CCG6_CFP 和 EZ-PD ™ CCG8_CFP 双单端口 USB-C PD
- EZ-PD™ CCG6DF 双端口和 CCG6SF 单端口 USB-C PD 控制器
- EZ-PD™ CCG7D 汽车双口 USB-C PD + DC-DC 控制器
- EZ-PD™ CCG7S 汽车单口 USB-C PD 解决方案,配备DC-DC控制器
- EZ-PD™ CCG7SAF 车规级单端口 USB-C PD + DC-DC 控制器 + FETs
- EZ-PD™ CCG8 双/单口 USB-C PD
- EZ-PD™ CMG1 USB-C EMCA 控制器
- 支持 EPR 的 EZ-PD™ CMG2 USB-C EMCA 控制器
- 最新动态
- 航空航天和国防
- 智能汽车解决方案
- 消费类电子产品
- 医疗保健和生活方式
- 家用电器
- 工业
- 信息和通信技术
- 可再生能源
- 机器人
- 安全解决方案
- 智能家居和楼宇
- 解决方案
- 概览
- 适配器和充电器
- 适用于智能电视的完整系统解决方案
- 移动设备和智能手机解决方案
- 多旋翼飞机和无人机
- 电动工具
- 家庭娱乐应用的半导体解决方案
- 智能会议系统
- 概览
- 汽车雷达系统
- 用于 ADAS 和自动驾驶的域控制器
- 车内传感应用 (ICMS)
- 多用途相机
- 概览
- 汽车辅助系统
- 车载网关
- 汽车配电系统
- 车身控制模块 (BCM)
- 舒适便捷电子产品
- 区域 DC-DC 转换器 48 V-12 V
- 区域控制器
- 概览
- 汽车车载主机
- 汽车 USB-C 电源和数据解决方案
- 汽车仪表盘
- 汽车远程信息处理控制单元 (TCU)
- 中央信息显示屏(CID)
- 高性能驾驶舱控制器
- 舱内无线充电
- 智能仪表盘(电动两轮车和三轮车)
- 概览
- 电信基础设施的 AC-DC 电源转换
- 适用于电信基础设施的 DC-DC 电源转换
- 有线和无线通信应用 FPGA
- Satellite communications
- 电力系统可靠性建模
- 用于电信基础设施的射频前端组件
- 最新动态
- 概览
- AIROC™ 软件&工具
- AURIX™应用软件
- Drive Core 用于汽车软件开发
- iMOTION™ 工具和软件
- Infineon智能功率开关和栅极驱动器工具套件
- MOTIX 软件&工具
- OPTIGA™工具和软件
- PSOC™ 软件&工具
- TRAVEO™ 软件&工具
- XENSIV™ 工具和软件
- XMC™ 工具和软件
- 概览
- AURIX™开发工作室
- EZ-PD™ CCGx Dock 软件开发工具包
- FMx Softune IDE
- ModusToolbox™ 软件
- PSOC™ Creator软件
- 雷达开发套件
- 锈
- USB 集线器控制器
- 无线连接蓝牙网状网络辅助应用程序
- XMC™ DAVE™ Software
- 最新动态
- 支持
- 培训
- 英飞凌开发者社区
- 最新消息
商业财经出版社
14/03/2025
商业财经出版社
11/03/2025
商业财经出版社
10/03/2025
商业财经出版社
04/03/2025
- 公司名称
- 我们的故事
- 活动资讯
- 新闻
- 投资者
- 职业生涯
- 质量
- 最新消息
商业财经出版社
14/03/2025
商业财经出版社
11/03/2025
商业财经出版社
10/03/2025
商业财经出版社
04/03/2025

关于
TRAVEO™ T2G 集群设备具有允许显示图形内容的图形子系统。
利用英飞凌的软件解决方案简化您的项目
为了帮助您充分发挥我们硬件的潜力,英飞凌提供了全面的软件产品。这些解决方案不仅支持我们的硬件功能,而且还提供了一种无缝的方式来快速启动和运行您的项目。我们的软件产品在开发时充分考虑了 Automotive SPICE 合规性,非常适合汽车生产使用。此外,我们的许多软件产品都提供 AUTOSAR 集成,这是客户的热门选择。
申请TRAVEO™软件的免费评估许可证
如需申请免费 3 个月评估许可证或访问以下软件包的现有许可证: TRAVEO™ T2G - AUTOSAR MCAL 驱动程序、AUTOSAR 复杂设备驱动程序、AUTOSAR 自检库、图形驱动程序、安全签名驱动程序、动态扭曲库,请单击此处
展示和窗口
显示模块监督TRAVEO™ T2G GPU 内部显示控制器的操作。 可以将多种效果实时应用于要在输出显示器上显示的活动视频流:
- 视频子系统具有一个或两个显示控制器,可分别连接到一个或两个显示器。每个显示器都有恒定的背景颜色。
- 最多 26 个图像缓冲区的内容可以在显示器上的单独矩形(称为“窗口”)中显示。
- 这些窗口按照定义的 z 顺序排列。重叠的矩形可以绘制为不透明的(只有较高级别的窗口可见),或者使用最多五个混合单元(称为“层”)将它们混合到较低级别的帧内容中。
- 窗口中显示的缓冲区可以是静态帧缓冲区,其中包含一个显示帧周期内窗口中显示的全部图像数据。该图像数据可以是从只读存储器读取的位图、由摄像机提供的视频帧或先前由视频子系统的 Blit Engine 渲染的图像。或者,窗口可以显示行缓冲区的内容,该缓冲区仅包含显示时由 Blit 引擎动态渲染的一部分图像数据。后者称为 OTF(即时)渲染。
Blit 引擎
Blit Engine 是一种硬件 IP,可以高效地在二维内存块上执行像素操作。它同时从最多三个源矩形读取数据,对这些矩形执行像素处理操作,并将结果存储在另一个矩形内存区域中。Blit Engine 提供了多种操作模式。
绘图引擎
绘图引擎是用于硬件加速轮廓矢量绘图的视频子系统组件。轮廓矢量最常用于字体渲染;绘图引擎针对此类用例进行了优化。然而,它并不局限于字体渲染,还可以用于任何轮廓矢量。轮廓曲线必须以矢量数据的形式提供。绘图引擎生成一个中间 alpha 位图,该位图将用作 blit 操作的 alpha 掩码。
捕获组件
捕获组件提供了一个 API 来将视频流捕获到内存或显示器。
同步
同步 API 和其他几个 API 提供了同步处理单元的机制。这是通过同步对象完成的。同步对象由两个参数定义:节点(想要同步的事件的标识符)和值(事件监督活动的状态)。必须先初始化这样的同步对象。要使用同步对象,必须调用以下序列:
- 为处理单元和条件定义同步对象。
- 使用此同步对象来控制不同的处理单元。该单元的所有后续操作的执行将被阻止,直到同步条件变为真。
错误报告
此 API 提供配置 ERROR、WARNING 和 INFO 消息报告的功能。这些消息的级别可以根据模块指定。
写回
回写 API 提供了将显示流的一帧存储在表面缓冲区中的可能性。
签名单元计算由 TRAVEO(TM) T2G MCU 的视频子系统创建的显示流的选定区域的 CRC 校验和。它可以将计算出的校验和与参考校验和进行比较。当计算出的校验和与其参考校验和不同时,签名单元可以通知安全签名驱动程序,后者可以将通知传递到应用程序级。签名单元对显示流的内容计算校验和之后,该流会再经过一个硬件单元,该单元称为“时序控制器”。为了确保此阶段显示流的完整性,安全签名驱动程序可以监视时序控制器的配置寄存器的内容。如果检测到任何受监控寄存器的修改,安全签名驱动程序会将错误情况通知应用软件。
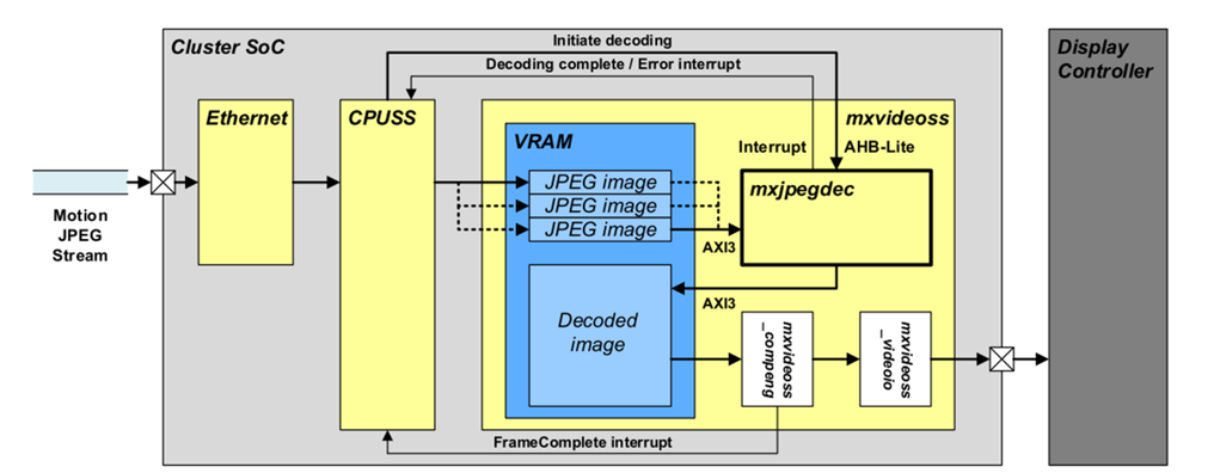
一些TRAVEO™ T2G 设备配备了用于解码 JPEG 图像的硬件单元。
用例包括通过以太网将运动 JPEG 流路由到TRAVEO™设备,并实时解码和显示视频流。
使用JPEG解码系统, TRAVEO™ T2G-C-2D-6M-DDR可实现高达2880x1080@60Hz的视频性能。
驱动程序支持配置设置如:
- 用于 YUV 4:4:4、灰色和 RGB(8 和 24bpp)的打包目标缓冲区
- YUV 4:2:2、4:1:1 和 4:2:0(8 和 16 bpC)的半平面目标缓冲区
- 通过样本复制将所有格式的色度上转换为 4:4:4
并提供:
- 控制 MMIO 寄存器和 SW 中断
- 检测损坏的数据和总线错误。
内部具有图形 IP 的TRAVEO™ T2G 设备由适当的图形驱动程序(GFX 驱动程序)支持。 该图形驱动程序与底层图形 IP 一起能够实时应用给定的图像扭曲坐标缓冲区来描述输出图像的失真。借助它的输出内容从而实现实时的视觉输出扭曲效果。
动态变形库独立于此图形驱动程序工作,允许从给定的较低分辨率的变形失真网格生成这样的变形坐标缓冲区,因此如果用户的视力视角发生变化,应用程序能够实时重新校准变形过程
利用英飞凌的软件解决方案简化您的项目
为了帮助您充分发挥我们硬件的潜力,英飞凌提供了全面的软件产品。这些解决方案不仅支持我们的硬件功能,而且还提供了一种无缝的方式来快速启动和运行您的项目。我们的软件产品在开发时充分考虑了 Automotive SPICE 合规性,非常适合汽车生产使用。此外,我们的许多软件产品都提供 AUTOSAR 集成,这是客户的热门选择。
申请TRAVEO™软件的免费评估许可证
如需申请免费 3 个月评估许可证或访问以下软件包的现有许可证: TRAVEO™ T2G - AUTOSAR MCAL 驱动程序、AUTOSAR 复杂设备驱动程序、AUTOSAR 自检库、图形驱动程序、安全签名驱动程序、动态扭曲库,请单击此处
展示和窗口
显示模块监督TRAVEO™ T2G GPU 内部显示控制器的操作。 可以将多种效果实时应用于要在输出显示器上显示的活动视频流:
- 视频子系统具有一个或两个显示控制器,可分别连接到一个或两个显示器。每个显示器都有恒定的背景颜色。
- 最多 26 个图像缓冲区的内容可以在显示器上的单独矩形(称为“窗口”)中显示。
- 这些窗口按照定义的 z 顺序排列。重叠的矩形可以绘制为不透明的(只有较高级别的窗口可见),或者使用最多五个混合单元(称为“层”)将它们混合到较低级别的帧内容中。
- 窗口中显示的缓冲区可以是静态帧缓冲区,其中包含一个显示帧周期内窗口中显示的全部图像数据。该图像数据可以是从只读存储器读取的位图、由摄像机提供的视频帧或先前由视频子系统的 Blit Engine 渲染的图像。或者,窗口可以显示行缓冲区的内容,该缓冲区仅包含显示时由 Blit 引擎动态渲染的一部分图像数据。后者称为 OTF(即时)渲染。
Blit 引擎
Blit Engine 是一种硬件 IP,可以高效地在二维内存块上执行像素操作。它同时从最多三个源矩形读取数据,对这些矩形执行像素处理操作,并将结果存储在另一个矩形内存区域中。Blit Engine 提供了多种操作模式。
绘图引擎
绘图引擎是用于硬件加速轮廓矢量绘图的视频子系统组件。轮廓矢量最常用于字体渲染;绘图引擎针对此类用例进行了优化。然而,它并不局限于字体渲染,还可以用于任何轮廓矢量。轮廓曲线必须以矢量数据的形式提供。绘图引擎生成一个中间 alpha 位图,该位图将用作 blit 操作的 alpha 掩码。
捕获组件
捕获组件提供了一个 API 来将视频流捕获到内存或显示器。
同步
同步 API 和其他几个 API 提供了同步处理单元的机制。这是通过同步对象完成的。同步对象由两个参数定义:节点(想要同步的事件的标识符)和值(事件监督活动的状态)。必须先初始化这样的同步对象。要使用同步对象,必须调用以下序列:
- 为处理单元和条件定义同步对象。
- 使用此同步对象来控制不同的处理单元。该单元的所有后续操作的执行将被阻止,直到同步条件变为真。
错误报告
此 API 提供配置 ERROR、WARNING 和 INFO 消息报告的功能。这些消息的级别可以根据模块指定。
写回
回写 API 提供了将显示流的一帧存储在表面缓冲区中的可能性。
签名单元计算由 TRAVEO(TM) T2G MCU 的视频子系统创建的显示流的选定区域的 CRC 校验和。它可以将计算出的校验和与参考校验和进行比较。当计算出的校验和与其参考校验和不同时,签名单元可以通知安全签名驱动程序,后者可以将通知传递到应用程序级。签名单元对显示流的内容计算校验和之后,该流会再经过一个硬件单元,该单元称为“时序控制器”。为了确保此阶段显示流的完整性,安全签名驱动程序可以监视时序控制器的配置寄存器的内容。如果检测到任何受监控寄存器的修改,安全签名驱动程序会将错误情况通知应用软件。
一些TRAVEO™ T2G 设备配备了用于解码 JPEG 图像的硬件单元。
用例包括通过以太网将运动 JPEG 流路由到TRAVEO™设备,并实时解码和显示视频流。
使用JPEG解码系统, TRAVEO™ T2G-C-2D-6M-DDR可实现高达2880x1080@60Hz的视频性能。
驱动程序支持配置设置如:
- 用于 YUV 4:4:4、灰色和 RGB(8 和 24bpp)的打包目标缓冲区
- YUV 4:2:2、4:1:1 和 4:2:0(8 和 16 bpC)的半平面目标缓冲区
- 通过样本复制将所有格式的色度上转换为 4:4:4
并提供:
- 控制 MMIO 寄存器和 SW 中断
- 检测损坏的数据和总线错误。
内部具有图形 IP 的TRAVEO™ T2G 设备由适当的图形驱动程序(GFX 驱动程序)支持。 该图形驱动程序与底层图形 IP 一起能够实时应用给定的图像扭曲坐标缓冲区来描述输出图像的失真。借助它的输出内容从而实现实时的视觉输出扭曲效果。
动态变形库独立于此图形驱动程序工作,允许从给定的较低分辨率的变形失真网格生成这样的变形坐标缓冲区,因此如果用户的视力视角发生变化,应用程序能够实时重新校准变形过程