- ASIC
- 电池管理 IC
- 时钟和时序解决方案
- ESD 和浪涌保护器件
- 汽车以太网
- 评估板
- 高可靠性
- 隔离
- 存储器
- 微控制器
- 功率产品
- 射频
- 安全智能卡解决方案
- 传感器技术
- 小信号晶体管和二极管
- 收发器
- 通用串行总线(USB)
- 无线连接
- 英飞凌大中华区生态圈
- 搜索工具
- 技术
- 封装
- 订单
- 概览
- 嵌入式闪存eFlash IP 解决方案
- RAM和Flash多芯片封装MCP解决方案
- F-RAM铁电存储器
- NOR 闪存
- nvsRAM非易失性存储器
- PSRAM — 伪静态RAM
- 抗辐射和高可靠性的存储器
- SRAM静态随机存储器
- 晶圆和裸片存储器解决方案
- 概览
- AC-DC电源转换
- 电动汽车动力系统
- D 类音频放大器 IC
- 非接触式电源和检测 IC
- DC-DC 转换器
- 二极管&晶闸管 (Si/SiC)
- 电子熔断器 eFuse
- 氮化镓(GaN)
- GaN EiceDRIVER™高速栅极驱动器
- IGBT 产品及驱动器件
- 智能功率模块(IPM)
- LED 驱动芯片
- 电动机驱动器
- MOSFET
- 功率模块
- 电源模块
- 保护和监控IC
- 碳化硅 (SiC)
- 智能电源开关
- 固态继电器
- 无线充电 IC
- 概览
- Calypso® 产品
- CIPURSE™ 产品
- 非接触式存储
- 了解 OPTIGA™ 嵌入式加密解决方案
- SECORA™ 安全解决方案
- 安全控制器
- 智能卡模块
- 政府身份证的智能解决方案
- 概览
- USB 2.0 外设控制器
- USB 3.2 外设控制器
- USB 集线器控制器
- USB PD 高压微控制器
- USB-C AC-DC 和 DC-DC 充电解决方案
- USB-C 充电端口控制器
- USB-C 供电控制器
- 概览
- AIROC™ 车载无线
- AIROC™ 蓝牙Bluetooth® 和多协议解决方案
- AIROC™ 互联微控制器
- AIROC™ Wi-Fi + Bluetooth® 组合
- 概览
- FM0+ 32 位 Arm® Cortex-M0®+ 微控制器 (MCU) 系列
-
FM3 32 位 Arm® Cortex-M3® 微控制器 (MCU) 系列
- 概览
- FM3 CY9AFx1xK 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx1xL/M/N 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx2xK/L 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx3xK/L 系列超低漏电流 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx4xL/M/N 系列低功耗 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFx5xM/N/R 系列低功耗 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9AFxAxL/M/N 系列超低漏电流 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx1xN/R 高性能系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx1xS/T 高性能系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx2xJ 系列 Arm® Cortex-M3®微控制器 (MCU)
- FM3 CY9BFx2xK/L/M 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM3 CY9BFx2xS/T 系列 Arm® Cortex-M3® 微控制器 (MCU)
- FM4 32 位 Arm® Cortex-M4® 微控制器 (MCU) 系列
- 概览
-
TriCore™ AURIX™ TC2x安全模块
- 概览
- AURIX™系列 – TC21xL
- AURIX™ 系列 – TC21xSC (无线充电)
- AURIX™ 系列 – TC22xL
- AURIX™系列 – TC23xL
- AURIX™ 系列 – TC23xLA (ADAS)
- AURIX™ 系列 – TC23xLX
- AURIX™ 系列 – TC264DA (ADAS)
- AURIX™系列 – TC26xD
- AURIX™ 系列 – TC27xT
- AURIX™ 系列 – TC297TA (ADAS)
- AURIX™ 系列 – TC29xT
- AURIX™ 系列 – TC29xTT (ADAS)
- AURIX™系列 – TC29xTX
- AURIX™ TC2x仿真器件
- 32 位TriCore™ AURIX™ – TC3x
- 32 位TriCore™ AURIX™ - TC4x
- 概览
- PSOC™ 4 Arm® Cortex® -M0/M0+
- PSOC™ 4 HV Arm® Cortex® -M0+
- PSOC™ 5 LP Arm® Cortex® -M3
- PSOC™ 6 Arm® Cortex-M4®/M0+
- PSOC™ 多点触控触摸屏控制器
- PSOC™ Control C3 Arm® Cortex®-M33
- PSOC™ Automotive 4: Arm® Cortex®-M0/M0+
- PSOC™ Edge Arm® Cortex® M55/M33
- 概览
- 32 位 TRAVEO™ T2G Arm® Cortex®用于车身电子应用
- 用于仪表盘的 32 位 TRAVEO™ T2G Arm® Cortex®
- 概览
- 32 位XMC1000工业微控制器 Arm® Cortex-M0®
- 32 位XMC4000工业微控制器 Arm® Cortex-M4®
- XMC5000 Industrial Microcontroller Arm® Cortex®-M4F
- 32 位XMC7000工业微控制器 Arm® Cortex-M7®
- 概览
- 桥式整流器和交流开关
- CoolSiC™ 肖特基二极管
- 二极管裸片
- 硅二极管
- 晶闸管/二极管模块
- 晶闸管软启动器模块
- 晶闸管/二极管盘
- 概览
- 汽车栅极驱动器
- Gate Driver ICs for SiC MOSFETs
- 电气隔离栅极驱动器
- 用于 GaN HEMT 的栅极驱动器 IC
- Half-Bridge Gate Driver ICs
- High-Side Gate Driver Ics
- 电平转换
- Low-Side Gate Driver Ics
- Three-Phase Gate Driver Ics
- 变压器驱动IC
- 概览
- BLDC 电机驱动器
- BDC电机驱动器
- 步进电机和伺服电机驱动器
- 带MCU的电机驱动器
- 使用 MOSFET 的桥式驱动器
- GaN EiceDRIVER™高速栅极驱动器
- 概览
- 汽车级MOSFET
- 双 MOSFET
- MOSFET(Si 和 SiC)模块
- N 沟道耗尽型 MOSFET
- N 沟道 MOSFET
- P 沟道 MOSFET
- 碳化硅 CoolSiC™ MOSFET
- 250V至600V G14小信号MOS
- 概览
- IGBT 模块
- MOSFET(Si 和 SiC)模块
- 智能功率模块(IPM)
- 二极管&晶闸管 (Si/SiC)
- IGBT CoolSiC™汽车功率模块
- 高密度功率模块
- 概览
- OPTIGA™ Authenticate
- OPTIGA™ Authenticate NFC 解决方案
- OPTIGA™ Connect – 交钥匙式 eSIM 安全解决方案
- OPTIGA™ Trust
- OPTIGA™ 可信平台模块 (TPM)
- 概览
- EZ-PD™ ACG1F 单端口 USB-C 控制器
- EZ-PD™ CCG2 USB Type-C 端口控制器
- EZ-PD™ CCG3PA Automotive USB-C 和 Power Delivery 控制器
- EZ-PD™ CCG4 双端口 USB-C 和 PD
- EZ-PD™ CCG5 双端口和 CCG5C 单端口 USB-C PD 控制器
- EZ-PD™ CCG6 单端口 USB-C & PD 控制器
- EZ-PD ™ CCG6_CFP 和 EZ-PD ™ CCG8_CFP 双单端口 USB-C PD
- EZ-PD™ CCG6DF 双端口和 CCG6SF 单端口 USB-C PD 控制器
- EZ-PD™ CCG7D 汽车双口 USB-C PD + DC-DC 控制器
- EZ-PD™ CCG7S 汽车单口 USB-C PD 解决方案,配备DC-DC控制器
- EZ-PD™ CCG8 双/单口 USB-C PD
- EZ-PD™ CMG1 USB-C EMCA 控制器
- 支持 EPR 的 EZ-PD™ CMG2 USB-C EMCA 控制器
- 最新动态
- 航空航天
- 人工智能和数据中心
- 智能汽车解决方案
- 通讯
- 消费类电子产品
- 健康和 生活方式
- 家用电器
- 工业
- 安全解决方案
- 智能家居和楼宇
- 解决方案
- 概览
- 电源适配器和充电器
- 适用于智能电视的完整系统解决方案
- 移动设备和智能手机解决方案
- 电动工具
- 家庭娱乐应用的半导体解决方案
- 智能会议系统
- 多旋翼飞机和无人机
- AR and smart glasses
- 最新动态
- 概览
- AIROC™ 软件&工具
- AURIX™应用软件
- DRIVECORE 用于汽车软件开发
- iMOTION™ 工具和软件
- Infineon智能功率开关和栅极驱动器工具套件
- MOTIX 软件&工具
- OPTIGA™工具和软件
- PSOC™ 软件&工具
- TRAVEO™ 软件&工具
- XENSIV™ 工具和软件
- XMC™ 工具和软件
- 概览
- EZ-PD™ CCGx Dock 软件开发工具包
- FMx Softune IDE
- ModusToolbox™ 软件
- PSOC™ Creator软件
- 雷达开发套件
- 锈
- USB 集线器控制器
- 无线连接蓝牙网状网络辅助应用程序
- XMC™ DAVE™ 软件
- 最新动态
- 支持
- 培训
- 英飞凌开发者社区
- 最新消息
商业财经新闻
29/05/2026
商业财经新闻
21/05/2026
商业财经新闻
07/05/2026
季度报告
06/05/2026
- 公司名称
- 我们的故事
- 活动资讯
- 新闻中心
- 投资者
- 职业生涯
- 质量
- 最新消息
商业财经新闻
29/05/2026
商业财经新闻
21/05/2026
商业财经新闻
07/05/2026
季度报告
06/05/2026
- 您即将进入英飞凌境外官方网站 Infineon.com。您的相关个人信息可能在境外被收集和处理, 用于交易、支付、履约及售后事宜
- 本境内网站 Infineon.cn 仅提供产品信息展示服务,不开展线上交易、订单处理、支付结算及电子商务平台运营活动
- 所有交易、支付、履约及售后事宜均由境外主体独立完成并承担全部法律责任
- 本网站与境外网站为独立运营主体,交易行为仅发生于您与境外运营主体之间
用于软件定义车辆的以太网摄像桥接器
英飞凌车载软桥接器依托高带宽以太网,高效转换传输摄像头视频信号、适配IEEE 1722标准,低延迟高同步,助力车载视觉系统高效互联稳定运行

软件定义汽车(SDV)正在重塑汽车行业,提供更安全、更环保、更吸引人的自动驾驶体验。基于以太网的车载网络(IVNs)可提供 SDV 所需的连接性、安全性、可扩展性和控制性,实现空中下载(OTA)更新,不断增强车辆的实用性和驾驶体验,同时为原始设备制造商带来新的经常性收入来源。
几十年来,以太网不断发展,以满足现实世界的网络需求,积累了一套丰富的标准和功能,可解决性能、可靠性和安全性问题,包括精确的时间同步和确定性调度,以及强大的访问控制和加密。随着汽车行业在 2014 年左右开始采用以太网,单对汽车以太网(如 100BASE-T1 和 1000BASE-T1)在提高带宽的同时降低了布线重量和成本,迅速成为 ADAS、感知和信息娱乐等高数据速率功能的主流车载主干网。现代汽车以太网利用时间敏感网络(TSN)来保证有界延迟,支持面向服务的通信和诊断,并集成了 MACsec 和 802.1X 等安全机制,以帮助减轻网络威胁和遵守新兴法规。
当每个车载设备--处理器、控制器、执行器以及传感器和摄像头--都通过以太网进行通信时,SDV 的核心承诺就实现了:能够对网络进行重新编程,并针对高级应用调整其关键特性。我们称之为 "端到端以太网"。
以太网功能可实现对 SDV 至关重要的四个关键属性:灵活性、可扩展性、冗余性和可控性。
- 灵活性: 以太网能够改变网络中的数据流,在域、处理器和其他共享资源(如存储)之间共享设备(如摄像头和传感器)。
- 可扩展性:这与 SDV 的软件和硬件都有关。软件驱动的功能更新通常需要重新配置数据和控制流量的路由方式,而以太网交换机可以通过简单的配置更改来处理。随着时间的推移,SDV 中的硬件也可以进行修改,在许多情况下,网络往往需要进行调整,以适应新的链路速度和 QoS 要求。基于以太网的架构可以直接进行这些更新。
- 冗余:为满足功能安全要求,冗余必须涵盖关键任务处理器和设备之间的数据通道,以保护网络。以太网的交换和多路径功能可实现路径多样性以及整个 IVN 主干网的负载平衡,并通过标准化硬件和协议提供这种冗余。
- 可控性:实时诊断和链路级调试可利用以太网操作、管理和维护(OAM)实现连续的自我诊断和故障管理,跟踪信道质量、链路裕度/降级和 EMC 漏洞。利用先进的人工智能/移动ML 分析技术,可以更准确地预测网络健康状况,从而支持更高的安全目标,并带来显著的经济效益。
如上所述,要实现车载 SDN 的全部功能,需要通过以太网连接车内的大多数设备。在当今先进的汽车架构中,高速主干网已经是以太网,但摄像头接口在很大程度上仍然是基于低压差分信令 (LVDS) 物理层技术的专有点对点 (P2P) 链路。最常见的两种是 GMSL(ADI)和 FPD-Link(TI)。目前正在开发 MIPI A-PHY 和 ASA 等较新的解决方案,以取代 LVDS,但它们仍作为点对点解决方案运行。
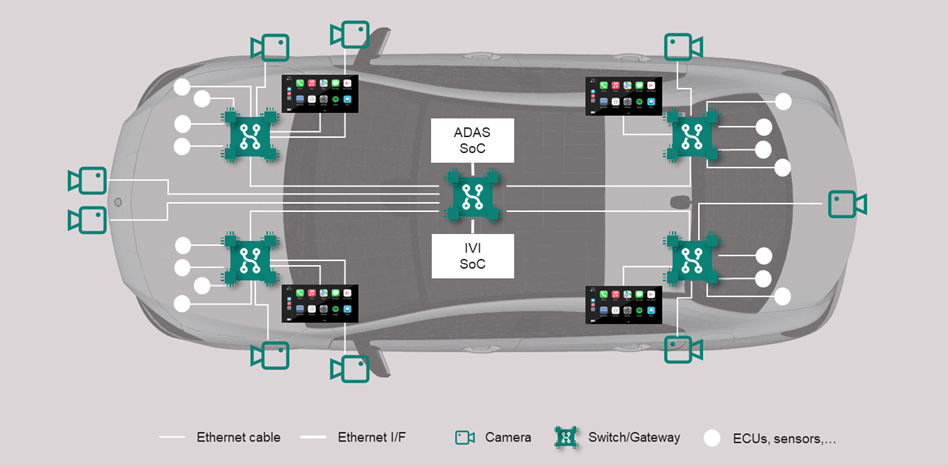
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
如图所示,大多数 ECU、传感器和其他设备(标记为白色小圆圈)都连接到区域以太网主干网,并从中受益。然而,摄像头仍然通过长电缆与SoC设备建立直接的点对点连接。这些 P2P 连接使得在 ADAS 和 IVI 域之间共享摄像机数据流非常困难。此外,这种拓扑结构缺乏可扩展性,冗余性也很弱:由于摄像机直接连接到一个处理器,该处理器一旦出现故障,就会中断对这些摄像机画面的访问。
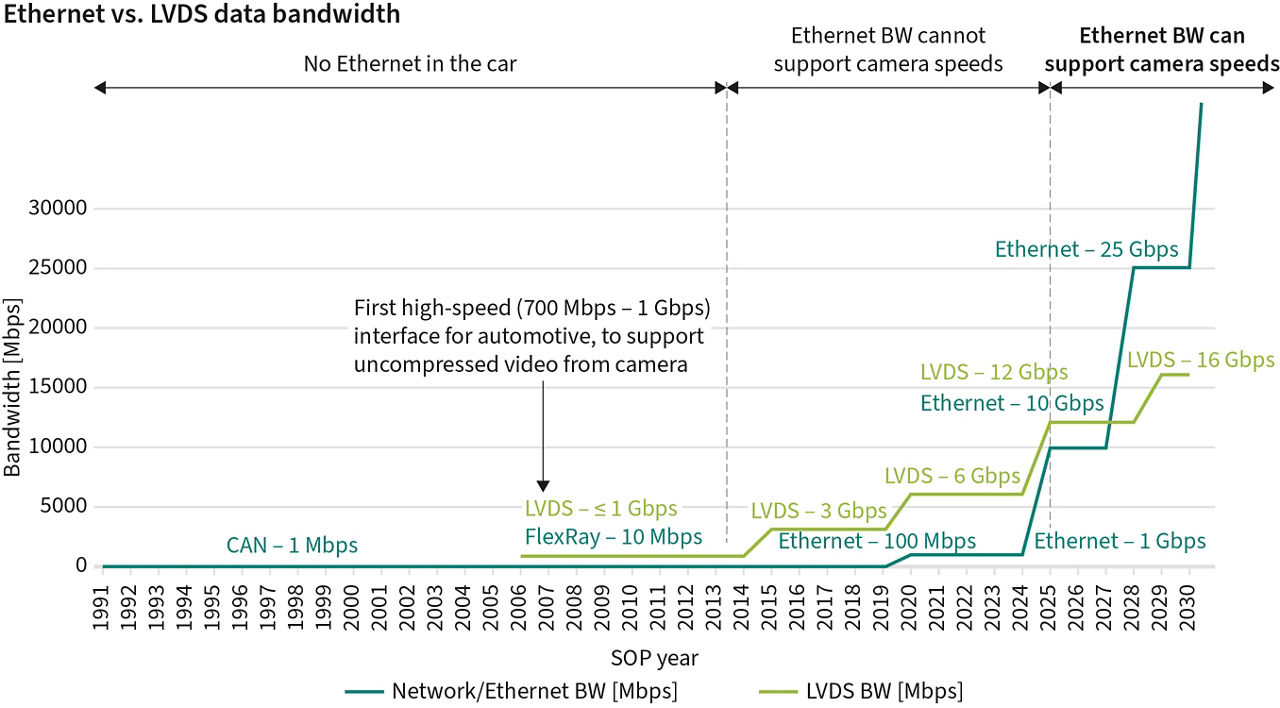
克服点对点 (P2P) 摄像机链路限制的最佳方法是在摄像机上直接将视频转换为以太网信号。为什么一开始没有使用以太网?一直以来,ADAS 摄像机都避免压缩,以尽量减少延迟并保持图像质量,这就需要非常高的原始数据传输速率。如下图所示,多年来,这些摄像头的速率都超过了车载以太网所能提供的速率,因此 OEM 依赖于 GMSL 和 FPD-Link (LVDS) 等专有串行器。基于 LVDS 的链路通常每一代扩展约 2 倍,而以太网则会跃升一个数量级,随着多千兆汽车以太网 PHY(2.5、5 和 10Gbs)的出现,以太网终于迎头赶上。展望未来,下一代摄像机的以太网速度将更快,最高可达 25 Gbps。
通过这些多千兆物理层(Multi-Gig PHY),一种新型的桥接设备可以部署在传感器端,使用IEEE 1722音视频标准打包视频,并以正确的时序和质量通过车辆的以太网网络传输。
IEEE 1722是一项标准,用于通过以太网传输时间敏感的音频和视频数据,确保数据流能够按时并准确地到达指定位置。
在这种情况下,IEEE 1722 如何发挥作用:
- 对于视频,摄像网桥充当 AVTP 的 "发送端",而 ADAS 或 IVI SoC 则是 "接收端"。AVTP(音视频传输协议)由 IEEE 1722 定义,是一种第 2 层传输技术,用于在以太网上传输对时间敏感的音频/视频流,对有效载荷格式和定时进行了标准化。
- 它将每个视频帧分割成以太网帧中承载的 AVTP 协议数据单元,并用唯一的流 ID (Stream ID)和序列号标记它们,以便进行识别和丢失检测。
- 每个数据包都包含一个与车辆时钟(基于gPTP/IEEE 802.1AS协议)同步的展示时间戳(presentation timestamp),从而确保受控延迟,并与其他传感器(如雷达、激光雷达等)的数据实现同步。这对于精确的传感器融合至关重要,是实现驾驶辅助功能的关键。
- 通过VLAN优先级和流标签(Stream)来实现服务质量(QoS),可选地结合TSN的整形/调度功能(例如802.1Qav/Qbv),从而确保视频数据获得保障的带宽和优先级。
- 数据流可以组播到组 MAC 地址,也可以选择使用 VLAN ID,从而允许多个处理器订阅相同的摄像机视频,而无需在源端进行复制。
- 为了安全起见,冗余路径和帧复制与消除可靠性(IEEE 802.1CB)等恢复功能可在链路或交换机出现故障时保持视频畅通。
此外,IEEE 1722 还支持从 SoC 到摄像头的控制和 GPIO 信号:
- 通过 IEEE 1722.1,计算机可发现摄像机网桥、读取其描述符、建立连接,并在发送视频流的同时发送控制指令(启动/停止、曝光、增益、模式更改)。
- GPIO 映射到控制/事件信息。输入和输出可根据 gPTP 时钟进行时间标记,以便在多台摄像机之间进行精确的同步触发。
- 控制流量优先(并可使用冗余路径/802.1CB)以确保即使在负载情况下也能实现低延迟、可靠的传输。
简而言之,IEEE 1722 可让摄像机视频以正确的时间、优先级和可靠性在车载以太网网络中传输,而 IEEE 1722.1 则提供简单、同步的控制和 GPIO,实现跨域共享和强大的冗余。
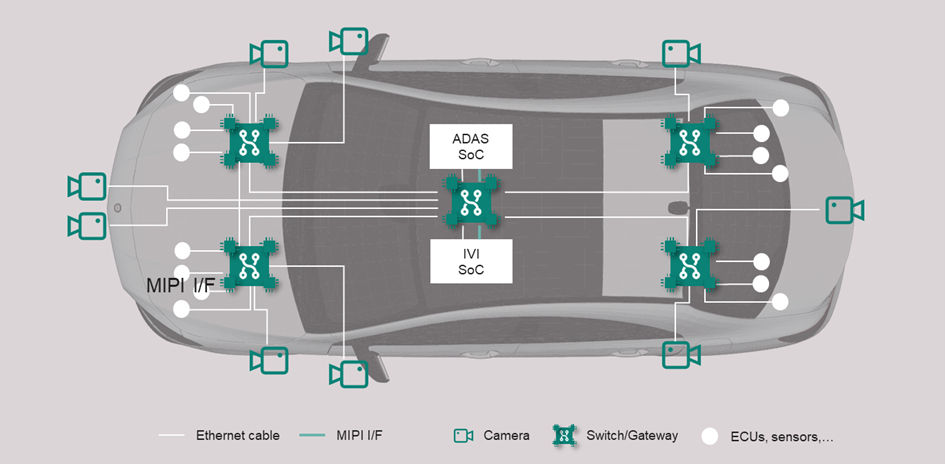
如下图所示,摄像机输出转换为以太网后,可连接到中央交换机或专用以太网聚合器,从而在多个 SoC 之间共享数据流。在成本效益较高的情况下,可使用轻巧的短电缆将摄像头连接到区域交换机上。
但这只是冰山一角。一旦摄像头接口的底层技术采用以太网,这些连接将自动兼容所有其他IEEE以太网标准,例如:
- 交换和虚拟化 - IEEE 802.1
- 安全性 - 验证和加密 - IEEE 802.1AE MACsec
- 网络时间同步 - IEEE PTP 1588
- 电缆供电 - IEEE PoDL 802.3bu
- 音频/视频桥接 - IEEE 802.1 AVB/TSN
- 非对称传输,使用高能效以太网协议 - IEEE 802.3az
- 支持所有拓扑结构:网状、星形、环形、菊花链、点对点
此外,当摄像机输出以太网时,摄像机供应商可以利用现有的以太网测试基础设施/设备,包括合规性、互操作性、电磁兼容性等,这些已被汽车行业验证和接受多年。
如下图所示,车载以太网的下一阶段是将所有高数据速率设备接入网络,包括显示器和中央高端计算单元(SoC)。未来的汽车预计将配备两到五个高分辨率显示器,而目前这些显示器通常使用专有的点对点链接,如 LVDS。将这些显示器迁移到以太网可使它们受益于上述以太网功能(确定性定时、QoS、安全、诊断等),同时通过基于标准的多供应商生态系统降低成本。
加速端到端以太网发展的一个并行趋势是,配备本地高速以太网端口(可扩展至 25 Gbps)的 SoC 的出现,以及对 IEEE 1722 视频流进行解包的专用硬件引擎。这减少了CPU的负担,降低了延迟,并实现了车载网络中无缝且可扩展的媒体传输。
在 SoC 上用原生 25G 以太网端口取代 MIPI CSI-2,可在性能、架构、安全性和可扩展性方面带来多项具体优势:
- - 整合带宽,减少引脚:一个25G以太网端口可以聚合多个摄像头的数据流,从而减少高速信号通道/引脚数量,简化PCB设计和封装,并在长距离传输中消除外部串行器的需求。
- 可共享且可扩展:以太网支持多播功能,使ADAS、IVI 以及数据记录可以使用相同的数据流;添加或重新路由摄像头变成了一个软件任务,而无需重新设计硬件电路板。
- 确定性和低开销:gPTP/TSN 可提供精确的时间同步。基于硬件的IEEE 1722解包通过DMA将数据传输至ISP/GPU,从而减轻CPU负担并降低延迟。
最终结果:原生的25G以太网使SoC成为可编程网络中的高吞吐量、时间同步节点,同时减少引脚数量和PCB复杂性,并在提升性能和系统弹性的同时,简化了车辆生命周期中功能的添加和更新过程。
早期的千兆位相机到以太网桥接器使用 IEEE 802.3ch 中定义的对称单对 PHY(如 2.5/5/10GBASE-T1)。然而,摄像机链路本身是不对称的--高速视频从摄像机流向 SoC,反方向只有低速控制流量。为了更好地匹配这种流量模式并减小 PHY 的尺寸和功耗,新标准 IEEE 802.3dm 引入了专为相机应用定制的非对称单对以太网 PHY。
IEEE 802.3dm 专注于将非对称单对以太网 PHY 引入汽车领域,专为数据流主要集中在单一方向的应用场景设计,如摄像头和显示器之间的连接。802.3dm 的目标是在传感器(例如摄像头)向处理器传输数据时实现更高的下行数据速率,同时提供较低的上行速率用于控制指令和状态信息的传输。我们的目标是提供高分辨率、低延迟视频所需的带宽,同时通过不过多预留返回路径来降低 PHY 功耗、硅面积和成本。
从技术角度来看,IEEE 802.3dm基于现有的802.3汽车以太网标准并进行了改进,适应于通过单一平衡对线缆实现非对称运行的应用需求。该标准旨在保留系统设计者所依赖的关键行为特点,包括全双工操作、汽车级电磁兼容(EMC)鲁棒性、与二层时间敏感网络(TSN)兼容的确定性延迟,以及可选功能如数据线供电(PoDL)。它还以典型的汽车布线和连接需求为目标,支持15米的传输距离,同时兼容STP(屏蔽双绞线)和同轴电缆。通过将链路速率与实际流量模式相匹配,802.3dm 可帮助节省边缘功耗,简化散热设计,并在不影响图像质量或时间的情况下实现更小的摄像头模块。
从系统角度来看,标准化非对称PHY(物理层)使得端到端以太网架构在视觉应用中成为可能。例如,摄像头和显示器可以直接连接到区域或中央交换机,借助多种控制单元(ECUs)共享流数据,并充分利用更广泛的以太网生态系统的优势。这些优势包括:用于调度的TSN(时间敏感网络)、用于安全性的MACsec、用于时间同步的PTP(精确时间协议),以及用于供电的PoDL(数据线供电)或同轴电缆供电(PoC)。这减少了对专有序列化器的需求,简化了布线,并促进了多供应商供应链的发展。
当前状态:802.3dm 是一个正在开发中的 IEEE 802.3 项目,其目标包括 2.5G、5G 和 10Gbps 的下行速度和 100Mbps 的上行速度。工作组正在通过IEEE的常规流程不断优化技术参数并完善草案文本。这些流程包括提案评估、草案编写以及投票表决等步骤。计划于2026年5月完成草案2.0的编制,并进入投票阶段。
在边缘将摄像头连接转换为以太网,为SDVs实现端到端以太网提供了可能:视频和控制信号通过IEEE 1722/1722.1进行封装,使数据流可在 ADAS 和 IVI 之间共享,通过 gPTP/TSN 实现精确的时间对齐,通过 MACsec 保证安全,并通过成熟的 OAM 进行观测,同时受益于成熟的汽车以太网合规性和 EMC 测试生态系统。随着本地 10-25 Gbps 以太网和 IEEE 1722 卸载成为 SoC 的标准配置,网络可通过软件实现更简单的扩展,而无需重新布线。IEEE 802.3dm 中出现的非对称单对 PHY,通过将高下行视频与轻量级上行控制相匹配,进一步优化了摄像机链路的功率、尺寸和成本。这些先进技术共同取代了专有的点对点链,采用了可编程、弹性和基于标准的结构,减少了布线和 BOM,提高了可靠性和安全性,并加快了整个车辆生命周期内的 OTA 功能交付。
几十年来,以太网不断发展,以满足现实世界的网络需求,积累了一套丰富的标准和功能,可解决性能、可靠性和安全性问题,包括精确的时间同步和确定性调度,以及强大的访问控制和加密。随着汽车行业在 2014 年左右开始采用以太网,单对汽车以太网(如 100BASE-T1 和 1000BASE-T1)在提高带宽的同时降低了布线重量和成本,迅速成为 ADAS、感知和信息娱乐等高数据速率功能的主流车载主干网。现代汽车以太网利用时间敏感网络(TSN)来保证有界延迟,支持面向服务的通信和诊断,并集成了 MACsec 和 802.1X 等安全机制,以帮助减轻网络威胁和遵守新兴法规。
当每个车载设备--处理器、控制器、执行器以及传感器和摄像头--都通过以太网进行通信时,SDV 的核心承诺就实现了:能够对网络进行重新编程,并针对高级应用调整其关键特性。我们称之为 "端到端以太网"。
以太网功能可实现对 SDV 至关重要的四个关键属性:灵活性、可扩展性、冗余性和可控性。
- 灵活性: 以太网能够改变网络中的数据流,在域、处理器和其他共享资源(如存储)之间共享设备(如摄像头和传感器)。
- 可扩展性:这与 SDV 的软件和硬件都有关。软件驱动的功能更新通常需要重新配置数据和控制流量的路由方式,而以太网交换机可以通过简单的配置更改来处理。随着时间的推移,SDV 中的硬件也可以进行修改,在许多情况下,网络往往需要进行调整,以适应新的链路速度和 QoS 要求。基于以太网的架构可以直接进行这些更新。
- 冗余:为满足功能安全要求,冗余必须涵盖关键任务处理器和设备之间的数据通道,以保护网络。以太网的交换和多路径功能可实现路径多样性以及整个 IVN 主干网的负载平衡,并通过标准化硬件和协议提供这种冗余。
- 可控性:实时诊断和链路级调试可利用以太网操作、管理和维护(OAM)实现连续的自我诊断和故障管理,跟踪信道质量、链路裕度/降级和 EMC 漏洞。利用先进的人工智能/移动ML 分析技术,可以更准确地预测网络健康状况,从而支持更高的安全目标,并带来显著的经济效益。
如上所述,要实现车载 SDN 的全部功能,需要通过以太网连接车内的大多数设备。在当今先进的汽车架构中,高速主干网已经是以太网,但摄像头接口在很大程度上仍然是基于低压差分信令 (LVDS) 物理层技术的专有点对点 (P2P) 链路。最常见的两种是 GMSL(ADI)和 FPD-Link(TI)。目前正在开发 MIPI A-PHY 和 ASA 等较新的解决方案,以取代 LVDS,但它们仍作为点对点解决方案运行。
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
图 1 中展示了一个典型的分区汽车网络示例,重点是使用摄像头传感器的两个领域:自动驾驶辅助系统(ADAS)和信息娱乐系统(IVI)。
如图所示,大多数 ECU、传感器和其他设备(标记为白色小圆圈)都连接到区域以太网主干网,并从中受益。然而,摄像头仍然通过长电缆与SoC设备建立直接的点对点连接。这些 P2P 连接使得在 ADAS 和 IVI 域之间共享摄像机数据流非常困难。此外,这种拓扑结构缺乏可扩展性,冗余性也很弱:由于摄像机直接连接到一个处理器,该处理器一旦出现故障,就会中断对这些摄像机画面的访问。
克服点对点 (P2P) 摄像机链路限制的最佳方法是在摄像机上直接将视频转换为以太网信号。为什么一开始没有使用以太网?一直以来,ADAS 摄像机都避免压缩,以尽量减少延迟并保持图像质量,这就需要非常高的原始数据传输速率。如下图所示,多年来,这些摄像头的速率都超过了车载以太网所能提供的速率,因此 OEM 依赖于 GMSL 和 FPD-Link (LVDS) 等专有串行器。基于 LVDS 的链路通常每一代扩展约 2 倍,而以太网则会跃升一个数量级,随着多千兆汽车以太网 PHY(2.5、5 和 10Gbs)的出现,以太网终于迎头赶上。展望未来,下一代摄像机的以太网速度将更快,最高可达 25 Gbps。
通过这些多千兆物理层(Multi-Gig PHY),一种新型的桥接设备可以部署在传感器端,使用IEEE 1722音视频标准打包视频,并以正确的时序和质量通过车辆的以太网网络传输。
IEEE 1722是一项标准,用于通过以太网传输时间敏感的音频和视频数据,确保数据流能够按时并准确地到达指定位置。
在这种情况下,IEEE 1722 如何发挥作用:
- 对于视频,摄像网桥充当 AVTP 的 "发送端",而 ADAS 或 IVI SoC 则是 "接收端"。AVTP(音视频传输协议)由 IEEE 1722 定义,是一种第 2 层传输技术,用于在以太网上传输对时间敏感的音频/视频流,对有效载荷格式和定时进行了标准化。
- 它将每个视频帧分割成以太网帧中承载的 AVTP 协议数据单元,并用唯一的流 ID (Stream ID)和序列号标记它们,以便进行识别和丢失检测。
- 每个数据包都包含一个与车辆时钟(基于gPTP/IEEE 802.1AS协议)同步的展示时间戳(presentation timestamp),从而确保受控延迟,并与其他传感器(如雷达、激光雷达等)的数据实现同步。这对于精确的传感器融合至关重要,是实现驾驶辅助功能的关键。
- 通过VLAN优先级和流标签(Stream)来实现服务质量(QoS),可选地结合TSN的整形/调度功能(例如802.1Qav/Qbv),从而确保视频数据获得保障的带宽和优先级。
- 数据流可以组播到组 MAC 地址,也可以选择使用 VLAN ID,从而允许多个处理器订阅相同的摄像机视频,而无需在源端进行复制。
- 为了安全起见,冗余路径和帧复制与消除可靠性(IEEE 802.1CB)等恢复功能可在链路或交换机出现故障时保持视频畅通。
此外,IEEE 1722 还支持从 SoC 到摄像头的控制和 GPIO 信号:
- 通过 IEEE 1722.1,计算机可发现摄像机网桥、读取其描述符、建立连接,并在发送视频流的同时发送控制指令(启动/停止、曝光、增益、模式更改)。
- GPIO 映射到控制/事件信息。输入和输出可根据 gPTP 时钟进行时间标记,以便在多台摄像机之间进行精确的同步触发。
- 控制流量优先(并可使用冗余路径/802.1CB)以确保即使在负载情况下也能实现低延迟、可靠的传输。
简而言之,IEEE 1722 可让摄像机视频以正确的时间、优先级和可靠性在车载以太网网络中传输,而 IEEE 1722.1 则提供简单、同步的控制和 GPIO,实现跨域共享和强大的冗余。
如下图所示,摄像机输出转换为以太网后,可连接到中央交换机或专用以太网聚合器,从而在多个 SoC 之间共享数据流。在成本效益较高的情况下,可使用轻巧的短电缆将摄像头连接到区域交换机上。
但这只是冰山一角。一旦摄像头接口的底层技术采用以太网,这些连接将自动兼容所有其他IEEE以太网标准,例如:
- 交换和虚拟化 - IEEE 802.1
- 安全性 - 验证和加密 - IEEE 802.1AE MACsec
- 网络时间同步 - IEEE PTP 1588
- 电缆供电 - IEEE PoDL 802.3bu
- 音频/视频桥接 - IEEE 802.1 AVB/TSN
- 非对称传输,使用高能效以太网协议 - IEEE 802.3az
- 支持所有拓扑结构:网状、星形、环形、菊花链、点对点
此外,当摄像机输出以太网时,摄像机供应商可以利用现有的以太网测试基础设施/设备,包括合规性、互操作性、电磁兼容性等,这些已被汽车行业验证和接受多年。
如下图所示,车载以太网的下一阶段是将所有高数据速率设备接入网络,包括显示器和中央高端计算单元(SoC)。未来的汽车预计将配备两到五个高分辨率显示器,而目前这些显示器通常使用专有的点对点链接,如 LVDS。将这些显示器迁移到以太网可使它们受益于上述以太网功能(确定性定时、QoS、安全、诊断等),同时通过基于标准的多供应商生态系统降低成本。
加速端到端以太网发展的一个并行趋势是,配备本地高速以太网端口(可扩展至 25 Gbps)的 SoC 的出现,以及对 IEEE 1722 视频流进行解包的专用硬件引擎。这减少了CPU的负担,降低了延迟,并实现了车载网络中无缝且可扩展的媒体传输。
在 SoC 上用原生 25G 以太网端口取代 MIPI CSI-2,可在性能、架构、安全性和可扩展性方面带来多项具体优势:
- - 整合带宽,减少引脚:一个25G以太网端口可以聚合多个摄像头的数据流,从而减少高速信号通道/引脚数量,简化PCB设计和封装,并在长距离传输中消除外部串行器的需求。
- 可共享且可扩展:以太网支持多播功能,使ADAS、IVI 以及数据记录可以使用相同的数据流;添加或重新路由摄像头变成了一个软件任务,而无需重新设计硬件电路板。
- 确定性和低开销:gPTP/TSN 可提供精确的时间同步。基于硬件的IEEE 1722解包通过DMA将数据传输至ISP/GPU,从而减轻CPU负担并降低延迟。
最终结果:原生的25G以太网使SoC成为可编程网络中的高吞吐量、时间同步节点,同时减少引脚数量和PCB复杂性,并在提升性能和系统弹性的同时,简化了车辆生命周期中功能的添加和更新过程。
早期的千兆位相机到以太网桥接器使用 IEEE 802.3ch 中定义的对称单对 PHY(如 2.5/5/10GBASE-T1)。然而,摄像机链路本身是不对称的--高速视频从摄像机流向 SoC,反方向只有低速控制流量。为了更好地匹配这种流量模式并减小 PHY 的尺寸和功耗,新标准 IEEE 802.3dm 引入了专为相机应用定制的非对称单对以太网 PHY。
IEEE 802.3dm 专注于将非对称单对以太网 PHY 引入汽车领域,专为数据流主要集中在单一方向的应用场景设计,如摄像头和显示器之间的连接。802.3dm 的目标是在传感器(例如摄像头)向处理器传输数据时实现更高的下行数据速率,同时提供较低的上行速率用于控制指令和状态信息的传输。我们的目标是提供高分辨率、低延迟视频所需的带宽,同时通过不过多预留返回路径来降低 PHY 功耗、硅面积和成本。
从技术角度来看,IEEE 802.3dm基于现有的802.3汽车以太网标准并进行了改进,适应于通过单一平衡对线缆实现非对称运行的应用需求。该标准旨在保留系统设计者所依赖的关键行为特点,包括全双工操作、汽车级电磁兼容(EMC)鲁棒性、与二层时间敏感网络(TSN)兼容的确定性延迟,以及可选功能如数据线供电(PoDL)。它还以典型的汽车布线和连接需求为目标,支持15米的传输距离,同时兼容STP(屏蔽双绞线)和同轴电缆。通过将链路速率与实际流量模式相匹配,802.3dm 可帮助节省边缘功耗,简化散热设计,并在不影响图像质量或时间的情况下实现更小的摄像头模块。
从系统角度来看,标准化非对称PHY(物理层)使得端到端以太网架构在视觉应用中成为可能。例如,摄像头和显示器可以直接连接到区域或中央交换机,借助多种控制单元(ECUs)共享流数据,并充分利用更广泛的以太网生态系统的优势。这些优势包括:用于调度的TSN(时间敏感网络)、用于安全性的MACsec、用于时间同步的PTP(精确时间协议),以及用于供电的PoDL(数据线供电)或同轴电缆供电(PoC)。这减少了对专有序列化器的需求,简化了布线,并促进了多供应商供应链的发展。
当前状态:802.3dm 是一个正在开发中的 IEEE 802.3 项目,其目标包括 2.5G、5G 和 10Gbps 的下行速度和 100Mbps 的上行速度。工作组正在通过IEEE的常规流程不断优化技术参数并完善草案文本。这些流程包括提案评估、草案编写以及投票表决等步骤。计划于2026年5月完成草案2.0的编制,并进入投票阶段。
在边缘将摄像头连接转换为以太网,为SDVs实现端到端以太网提供了可能:视频和控制信号通过IEEE 1722/1722.1进行封装,使数据流可在 ADAS 和 IVI 之间共享,通过 gPTP/TSN 实现精确的时间对齐,通过 MACsec 保证安全,并通过成熟的 OAM 进行观测,同时受益于成熟的汽车以太网合规性和 EMC 测试生态系统。随着本地 10-25 Gbps 以太网和 IEEE 1722 卸载成为 SoC 的标准配置,网络可通过软件实现更简单的扩展,而无需重新布线。IEEE 802.3dm 中出现的非对称单对 PHY,通过将高下行视频与轻量级上行控制相匹配,进一步优化了摄像机链路的功率、尺寸和成本。这些先进技术共同取代了专有的点对点链,采用了可编程、弹性和基于标准的结构,减少了布线和 BOM,提高了可靠性和安全性,并加快了整个车辆生命周期内的 OTA 功能交付。